 3D Printers
3D Printers MAKERBOT
MAKERBOT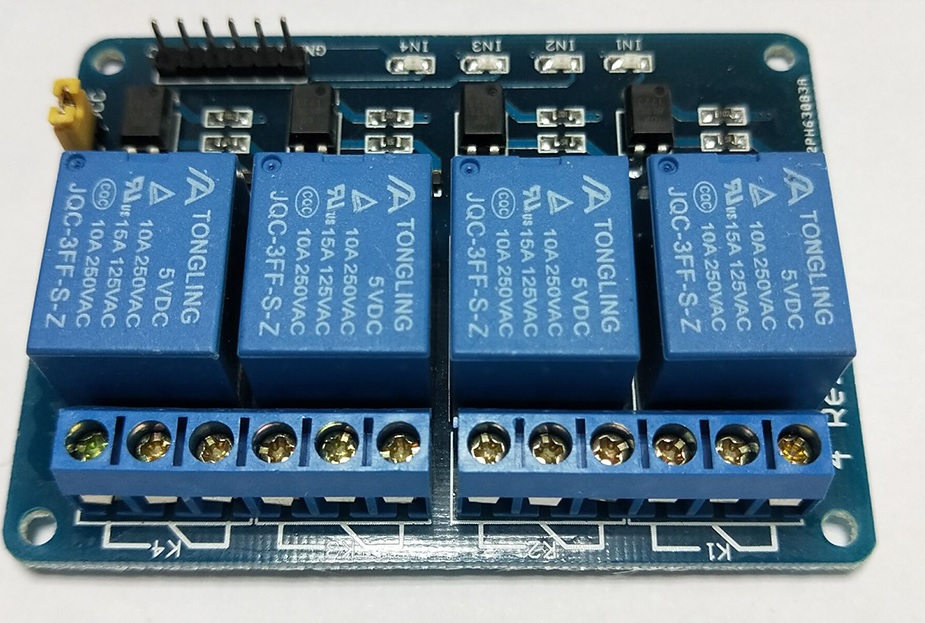 Relay
Relay 3D Printer Parts
3D Printer Parts Nozzle
Nozzle Filament
Filament ToboFill
ToboFill eSun
eSun Ducho Filla
Ducho Filla Linear Guide Rail
Linear Guide Rail Timing Belt, Pulley and wheel
Timing Belt, Pulley and wheel Lead Screw
Lead Screw Extruder Kit
Extruder Kit Display
Display Cooling Fan
Cooling Fan Teflon Tube
Teflon Tube Other Sensor
Other Sensor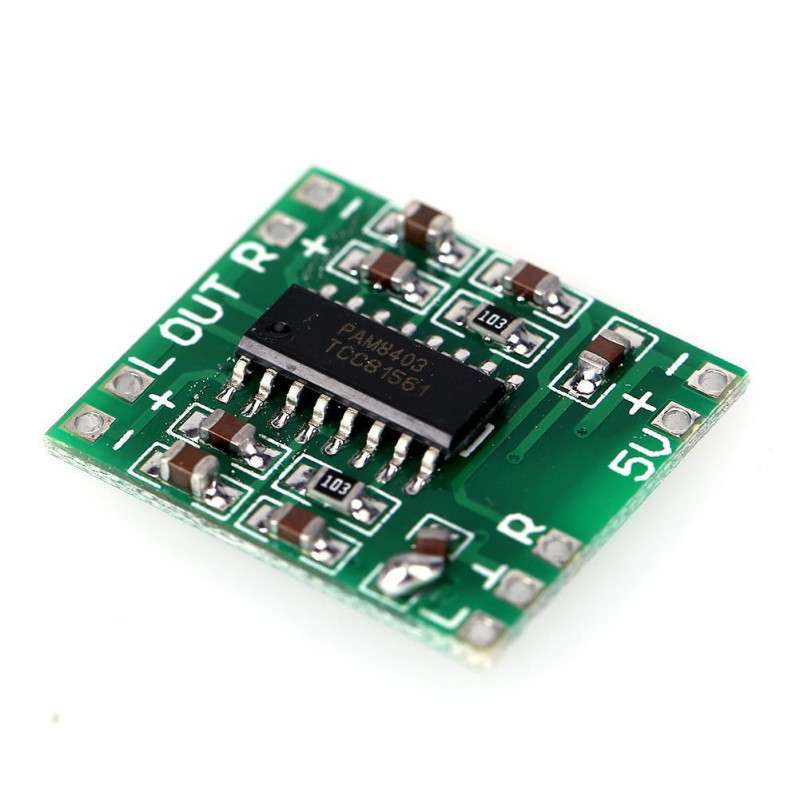 Audio Module
Audio Module Micro-Controller
Micro-Controller Arduino
Arduino Display
Display Linear Guide Rail
Linear Guide Rail Filament
Filament Wheel
Wheel Omni Wheels
Omni Wheels BO Motor Wheel
BO Motor Wheel Lead Screw
Lead Screw Bolts and Screws
Bolts and Screws Nut
Nut Bearing
Bearing Linear Bearing
Linear Bearing Propeller
Propeller Switch
Switch Battery
Battery SOLENOID VALVE
SOLENOID VALVE Hub Motor
Hub Motor DC Motors
DC Motors Motor without Gearbox
Motor without Gearbox Servo Motors
Servo Motors Stepper Motor
Stepper Motor Motor Driver
Motor Driver DC Motor Driver
DC Motor Driver Communication
Communication Data Transfer
Data Transfer Wire
Wire Range Sensor
Range Sensor Ultra Sonic
Ultra Sonic Lidar
Lidar Biometric
Biometric Finger Print Sensor
Finger Print Sensor Optical Sensor
Optical Sensor Other
Other LED bulb
LED bulb LED Inverter Bulb
LED Inverter Bulb SMPS
SMPS
Lidar is a method for measuring distances by illuminating the target with laser light and measuring the reflection with a sensor. Differences in laser return times and wavelengths can then be used to make digital 3-D representations of the target. It has terrestrial, airborne, and mobile applications

RP Lidar A1M8
OVERVIEW
- Model: RP LIDAR A1M8
- Distance range: 0.2 – 6m (Radius)
- Angular range: 0-360°
- Distance resolution: <0.5mm (1% of the distance)
- Angular resolution: =<1°
- Sample duration: 0.5 Mili Seconds
- Sample frequency: >=2000Hz
- Standoffs: M2.5 x 15mm
- Scan rate: 5.5Hz
- Dimensions (mm): 60x 70x 99
- Weight (gm): 170

RP LIDAR A2M8
OVERVIEW
- Model: RP LIDAR A2M8
- Scanning Range: 18M
- Scan Rate: 5~15Hz,Typical 10Hz
- Distance Range: 0.15 – 12m, Based on white objects with 70% reflectivity
- Angular Range: 0-360 Degree
- Distance Resolution: <0.5mm
- Angular Resolution: 0.45~1.35 degree,Typical 0.9 degree
- Sample Duration: 0.25ms
- Sample Frequency: 2000~8000Hz,Typical 4000Hz
- Battery: Excluded
- Dimensions (mm): 76 x 41 (Diameter x Height)
- Weight (gm): 190

TFMini-S Micro LiDAR Distance Sensor for Drones UAV UAS Robots (12m)
OVERVIEW
- Operating Range: 0.1m~12m@90%Reflectivity
- Accuracy: ±6cm@(1-6m)
- Distance Resolution(cm): 1
- Frame Rate(Hz): 100
- Ambient light immunity: 70Klux
- Operating Temperature(℃): 0℃~60℃
- FOV: 2°
- Supply Voltage(V): 5V±0.1V
- Average current(mA): ≤140mA
- Power Consumption(W): ≤0.7W
- Peak current(mA): 200
- Communication Interface: UART / I2C
- Cable Length(cm): 10
- Dimension (mm): 42x 15x 16
- Weight(g): 5g±0.3g

VL53L0X TOF Based LIDAR Laser Distance Sensor
The VL53L0X is a time-of-flight ranging system integrated into a compact module which uses ST’s FlightSense technology to precisely measure how long it takes for emitted pulses of infrared light to reach the nearest object and be reflected back to a detector.This time-of-flight(TOF) measurement enables it to accurately determine the absolute distance to a target without the object’s reflectance greatly influencing the measurement.The module can be powered by a source of 2.6V to 5.5V which is then regulated to 2.8V using the onboard regulator. For communication, you can use the I2C communication pins.

